元件定义
该元件实现 Park 变换和逆 Park 变换计算。
元件说明
CloudPSS 元件包含统一的属性选项,其配置方法详见 参数卡 页面。
Configuration
Configuration
| 参数名 | 键名 | 类型 [单位] | 描述 |
|---|
| Name | Name | 文本 | 元件名称
此处输入Park变换器的名称(可缺省) |
| Direction of Transformation | Direction | 选择 | 变换方向
选择变换的方向为Park变换或逆Park变换 |
| Rotating Frame Alignment | Alignment | 选择 | 旋转轴对齐
选择坐标变换的d轴与A相对齐或滞后90度 |
| 引脚名 | 键名 | 类型 | 维度 | 描述 |
|---|
| Theta | 0 | 输入 | 1 × 1 | 相角输入端口 |
| d | 1 | 输入 | 1 × 1 | 逆Park变换时d轴的输入端口 |
| q | 2 | 输入 | 1 × 1 | 逆Park变换时q轴的输入端口 |
| A | 3 | 输出 | 1 × 1 | 逆Park变换时a相的输出端口 |
| B | 4 | 输出 | 1 × 1 | 逆Park变换时b相的输出端口 |
| C | 5 | 输出 | 1 × 1 | 逆Park变换时c相的输出端口 |
| A | 6 | 输入 | 1 × 1 | Park变换时a相的输入端口 |
| B | 7 | 输入 | 1 × 1 | Park变换时b相的输入端口 |
| C | 8 | 输入 | 1 × 1 | Park变换时c相的输入端口 |
| d | 9 | 输出 | 1 × 1 | Park变换时d轴的输出端口 |
| q | 10 | 输出 | 1 × 1 | Park变换时q轴的输出端口 |
使用说明
 坐标位置
坐标位置
当选择 d 轴与 a 相对齐时,Park 变换及逆 Park 变换的计算公式为:
UdUqU0=32cosθ−sin(θ)1/2cos(θ−2π/3)−sin(θ−2π/3)1/2cos(θ+2π/3)−sin(θ+2π/3)1/2UaUbUc
UaUbUc=cosθcos(θ−2π/3)cos(θ+2π/3)−sin(θ)−sin(θ−2π/3)−sin(θ+2π/3)111UdUqU0
注意:传统 Park 变换中,d 轴超前 q 轴。dq 轴位置如上图红线所示。PSCAD 中采用了 q 轴超前 d 轴,如上图蓝线所示。因此相同输入下,本元件得出的 q 轴分量与 PSCAD 的结果正负相反。
 坐标位置
坐标位置
当选择 d 轴滞后 a 相 90°时,dq 轴位置如上图绿线所示。Park 变换及逆 Park 变换的计算公式为:
UdUqU0=32sin(θ)cosθ1/2sin(θ−2π/3)cos(θ−2π/3)1/2sin(θ+2π/3)cos(θ+2π/3)1/2UaUbUc
UaUbUc=sin(θ)sin(θ−2π/3)sin(θ+2π/3)cosθcos(θ−2π/3)cos(θ+2π/3)111UdUqU0
下图展示了四种常用的Park变换类型的区别以及和各商用仿真软件的对应关系。
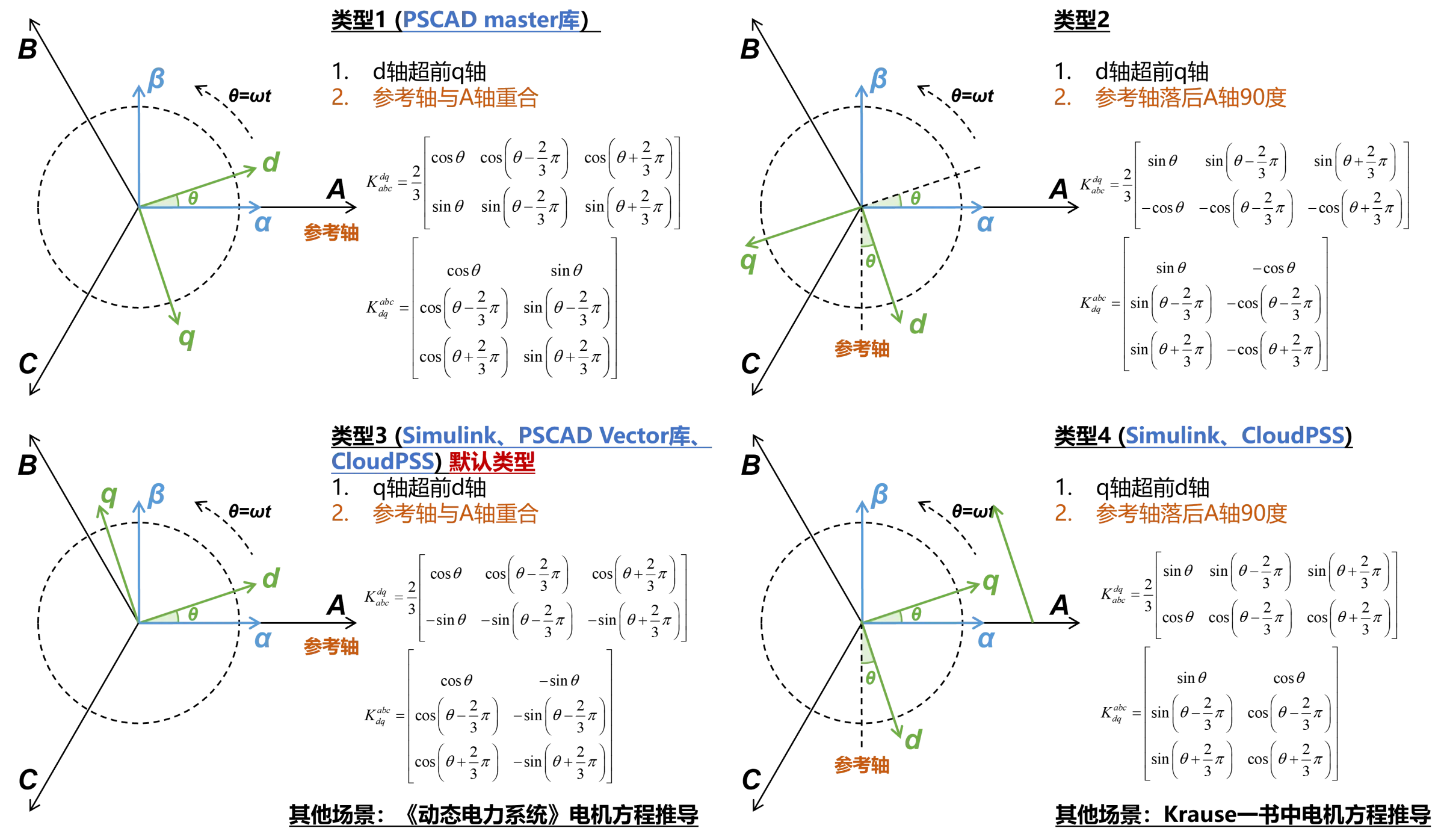 四种Park变换类型
四种Park变换类型
常见问题